1. 導入
Orientation Sensor API は Generic Sensor API [GENERIC-SENSOR] を拡張し、三次元デカルト座標系に対するデバイスの物理的な方位を 記述する汎用情報を提供する。
AbsoluteOrientationSensor
クラスは OrientationSensor
インターフェイスから継承し、
地球の
参照座標系に対するデバイスの物理的な方位を記述する。
他のサブクラスは、真北などの他の静止した方向、または デバイス自身の z 位置に対して、その最新の最も安定した z 位置へ ドリフトしていくような非静止方向に対する方位を記述する。
OrientationSensor
サブクラスにより提供されるデータは、
DeviceOrientationEvent
からのデータと類似しているが、Orientation Sensor API には次の重要な違いがある:
-
Orientation Sensor API は、方位データを WebGL 互換形式(クォータニオン、 回転行列)で表す。
-
Orientation Sensor API は、より厳格なレイテンシー要件を満たす。
-
DeviceOrientationEventとは異なり、OrientationSensorサブクラスは、方位データを取得するためにどの 低レベル モーションセンサーが使用されるかを明示的に定義し、それにより起こり得る相互運用性の問題を 不要にする。 -
OrientationSensorサブクラスのインスタンスは、SensorOptionsコンストラクター引数を介して設定可能である。
2. ユースケースと要件
ユースケースと要件は、 Motion Sensors Explainer 文書で議論されている。
3. 例
const sensor= new AbsoluteOrientationSensor(); const mat4= new Float32Array( 16 ); sensor. start(); sensor. onerror= event=> console. log( event. error. name, event. error. message); sensor. onreading= () => { sensor. populateMatrix( mat4); };
const sensor= new AbsoluteOrientationSensor({ frequency: 60 }); const mat4= new Float32Array( 16 ); sensor. start(); sensor. onerror= event=> console. log( event. error. name, event. error. message); function draw( timestamp) { window. requestAnimationFrame( draw); try { sensor. populateMatrix( mat4); } catch ( e) { // mat4 has not been updated. } // Drawing... } window. requestAnimationFrame( draw);
4. セキュリティとプライバシーに関する考慮事項
Generic Sensor API [GENERIC-SENSOR] で説明されているものを超える、 特定のセキュリティおよびプライバシーに関する考慮事項はない。
5. モデル
OrientationSensor
クラスは Sensor
クラスを拡張し、デバイス方位データを表す汎用インターフェイスを提供する。
Orientation Sensor センサー型の最新読み取り値に アクセスするために、ユーザーエージェントは、具象方位センサーが使用する各低レベルセンサーについて、 センサーアクセスを要求する抽象操作を呼び出さなければならない。 下の表は、具象方位センサーと、低レベルセンサーにより定義される許可トークンとの対応関係を記述する。
| OrientationSensor サブクラス | 許可トークン |
|---|---|
AbsoluteOrientationSensor
| "accelerometer", "gyroscope", "magnetometer"
|
RelativeOrientationSensor
| "accelerometer", "gyroscope"
|
AbsoluteOrientationSensor
は、文字列 "accelerometer"、"gyroscope"、および "magnetometer" により識別される
ポリシー制御機能である。その
既定の許可リストは 'self' である。
RelativeOrientationSensor
は、文字列 "accelerometer" および "gyroscope" により識別される
ポリシー制御機能である。その
既定の許可リストは 'self' である。
最新読み取り値は、Orientation Sensor
センサー
型の Sensor
について、キーが
"quaternion" であり、値が 4 要素の リストを含む
エントリーを含む。
リストの要素は、単位クォータニオン
[QUATERNIONS]
[Vx * sin(θ/2), Vy * sin(θ/2), Vz * sin(θ/2), cos(θ/2)] の成分に等しい。
ここで V は回転軸を表す単位ベクトル(その要素は Vx、Vy、および Vz)であり、
θ は単位ベクトル V により定義される軸まわりの回転角である。
注記: クォータニオン成分は、 リスト内に [q1, q2, q3, q0] [QUATERNIONS] として配置される。 すなわち、クォータニオンのベクトル部を表す成分が先に来て、cos(θ/2) に等しい スカラー部成分が後に来る。この順序は、既存のほとんどの WebGL フレームワークとの 互換性を高めるために使用される。 ただし、他のライブラリは、クォータニオンを配列として公開するときに別の順序、たとえば [q0, q1, q2, q3] を使用する可能性がある。
低レベルモーションセンサーの
センサーフュージョンを
通して作成される具象 OrientationSensor
サブクラスを下の表に示す:
| OrientationSensor サブクラス | 低レベルモーションセンサー |
|---|---|
AbsoluteOrientationSensor
| Accelerometer,
Gyroscope,
Magnetometer
|
RelativeOrientationSensor
| Accelerometer,
Gyroscope
|
注記: Accelerometer、
Gyroscope
および Magnetometer
低レベルセンサーは、それぞれ
[ACCELEROMETER]、[GYROSCOPE]、および [MAGNETOMETER]
仕様で定義される。
センサーフュージョンはプラットフォーム固有であり、ソフトウェアまたは
ハードウェア、すなわちセンサーハブ上で発生し得る。
AbsoluteOrientationSensor
について、start()
を呼び出す前に、明示的に許可を照会する。
const sensor= new AbsoluteOrientationSensor(); Promise. all([ navigator. permissions. query({ name: "accelerometer" }), navigator. permissions. query({ name: "magnetometer" }), navigator. permissions. query({ name: "gyroscope" })]) . then( results=> { if ( results. every( result=> result. state=== "granted" )) { sensor. start(); ... } else { console. log( "No permissions to use AbsoluteOrientationSensor." ); } });
別の方法は、単に start()
を呼び出し、
onerror
イベントハンドラーを購読することである。
const sensor= new AbsoluteOrientationSensor(); sensor. onerror= event=> { if ( event. error. name=== 'NotAllowedError' ) console. log( "No permissions to use AbsoluteOrientationSensor." ); }; sensor. start();
5.1. AbsoluteOrientationSensor モデル
Absolute
Orientation Sensor センサー型は、Motion Sensors Explainer
§ absolute-orientation で説明されるセンサーを表す。これに関連付けられた
拡張センサーインターフェイスは AbsoluteOrientationSensorであり、
OrientationSensor
のサブクラスである。
これに関連付けられた 仮想センサー型は
"absolute-orientation"
である。
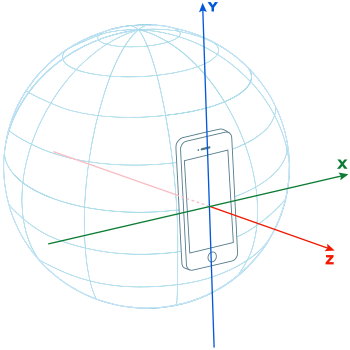
絶対方位センサーについては、最新 読み取り値["quaternion"] の値は、 三次元デカルト座標系 (x, y, z) として定義される 地球の参照 座標系に対する、デバイスの ローカル 座標系の回転を表す。ここで:
-
x 軸は、地面に接し東を指す y.z のベクトル積である。
-
y 軸は地面に接し、磁北を指す。
-
z 軸は空を指し、x 軸と y 軸で構成される平面に垂直である。
デバイスの ローカル座標系は、低レベル モーションセンサーについて定義されるものと同じである。それは デバイス座標系または スクリーン座標系のいずれかであり得る。
注記: 下の図は、デバイスの ローカル座標系と 地球の 参照座標系が整列している場合を表す。したがって、 方位センサーの 最新読み取り値は、各軸まわりの 0 (rad) [SI] 回転を表す。
5.2. RelativeOrientationSensor モデル
Relative
Orientation Sensor センサー型は、Motion Sensors Explainer
§ relative-orientation で説明されるセンサーを表す。これに関連付けられた
拡張センサーインターフェイスは RelativeOrientationSensorであり、
OrientationSensor
のサブクラスである。
これに関連付けられた 仮想センサー型は
"relative-orientation"
である。
相対方位センサーについては、最新 読み取り値["quaternion"] の値は、 静止参照座標系に対する、 デバイスの ローカル座標系の回転を表す。 静止参照座標系は、 ジャイロスコープセンサーにより導入されるバイアスによってドリフトし得る。したがって、 センサーにより提供される回転値は、時間とともにドリフトし得る。
静止参照座標系は、センサーをホストするデバイスが 環境内を移動しても静止したままである、慣性三次元 デカルト座標系として定義される。
デバイスの ローカル座標系は、低レベル モーションセンサーについて定義されるものと同じである。それは デバイス座標系または スクリーン座標系のいずれかであり得る。
注記: 相対方位センサーのデータは、 磁場の影響を受けないため、絶対方位センサーが提供するものより正確であり得る。
6. API
6.1. OrientationSensor インターフェイス
typedef (Float32Array or Float64Array or DOMMatrix ); [RotationMatrixType SecureContext ,Exposed =Window ]interface :OrientationSensor Sensor {readonly attribute FrozenArray <double >?;quaternion undefined (populateMatrix RotationMatrixType ); };targetMatrix enum {OrientationSensorLocalCoordinateSystem ,"device" };"screen" dictionary :OrientationSensorOptions SensorOptions {OrientationSensorLocalCoordinateSystem = "device"; };referenceFrame
6.1.1. OrientationSensor.quaternion
デバイス方位を表す単位クォータニオンの成分を要素として含む、
4 要素の FrozenArray
を返す。
言い換えると、この属性は、
最新読み取り値から値を取得するを
6.1.2. OrientationSensor.populateMatrix()
populateMatrix(targetMatrix)
メソッドの手順は次のとおりである:
-
targetMatrix が
Float32ArrayまたはFloat64Array型であり、そのサイズが 16 未満である場合、"TypeError" 例外を投げ、 これらの手順を中止する。 -
quaternion を、最新読み取り値から値を取得するを this および "quaternion" を引数として呼び出した結果とする。
-
quaternion が
nullである場合、"NotReadableError"DOMExceptionを投げ、 これらの手順を中止する。 -
rotationMatrix を、quaternion[0]、quaternion[1]、 quaternion[2]、および quaternion[3] を用いて クォータニオンを回転 行列に変換することの結果とする。
-
targetMatrix が
Float32ArrayまたはFloat64Array型である場合、次のサブ手順を実行する:-
targetMatrix[0] = rotationMatrix[0] に設定する
-
targetMatrix[1] = rotationMatrix[1] に設定する
-
targetMatrix[2] = rotationMatrix[2] に設定する
-
targetMatrix[3] = rotationMatrix[3] に設定する
-
targetMatrix[4] = rotationMatrix[4] に設定する
-
targetMatrix[5] = rotationMatrix[5] に設定する
-
targetMatrix[6] = rotationMatrix[6] に設定する
-
targetMatrix[7] = rotationMatrix[7] に設定する
-
targetMatrix[8] = rotationMatrix[8] に設定する
-
targetMatrix[9] = rotationMatrix[9] に設定する
-
targetMatrix[10] = rotationMatrix[10] に設定する
-
targetMatrix[11] = rotationMatrix[11] に設定する
-
targetMatrix[12] = rotationMatrix[12] に設定する
-
targetMatrix[13] = rotationMatrix[13] に設定する
-
targetMatrix[14] = rotationMatrix[14] に設定する
-
targetMatrix[15] = rotationMatrix[15] に設定する
-
-
targetMatrix が
DOMMatrix型である場合、次のサブ手順を実行する:-
targetMatrix.m11 = rotationMatrix[0] に設定する
-
targetMatrix.m12 = rotationMatrix[1] に設定する
-
targetMatrix.m13 = rotationMatrix[2] に設定する
-
targetMatrix.m14 = rotationMatrix[3] に設定する
-
targetMatrix.m21 = rotationMatrix[4] に設定する
-
targetMatrix.m22 = rotationMatrix[5] に設定する
-
targetMatrix.m23 = rotationMatrix[6] に設定する
-
targetMatrix.m24 = rotationMatrix[7] に設定する
-
targetMatrix.m31 = rotationMatrix[8] に設定する
-
targetMatrix.m32 = rotationMatrix[9] に設定する
-
targetMatrix.m33 = rotationMatrix[10] に設定する
-
targetMatrix.m34 = rotationMatrix[11] に設定する
-
targetMatrix.m41 = rotationMatrix[12] に設定する
-
targetMatrix.m42 = rotationMatrix[13] に設定する
-
targetMatrix.m43 = rotationMatrix[14] に設定する
-
targetMatrix.m44 = rotationMatrix[15] に設定する
-
6.2. AbsoluteOrientationSensor インターフェイス
[SecureContext ,Exposed =Window ]interface :AbsoluteOrientationSensor OrientationSensor {(constructor optional OrientationSensorOptions = {}); };sensorOptions
AbsoluteOrientationSensor
オブジェクトを構築するために、ユーザーエージェントは
AbsoluteOrientationSensor
インターフェイスについて
方位センサーオブジェクトを構築する抽象操作を
呼び出さなければならない。
AbsoluteOrientationSensor
のサポートされるセンサーオプションは、
"frequency" および "referenceFrame" である。
6.3. RelativeOrientationSensor インターフェイス
[SecureContext ,Exposed =Window ]interface :RelativeOrientationSensor OrientationSensor {(constructor optional OrientationSensorOptions = {}); };sensorOptions
RelativeOrientationSensor
オブジェクトを構築するために、ユーザーエージェントは
RelativeOrientationSensor
インターフェイスについて
方位センサーオブジェクトを構築する抽象操作を
呼び出さなければならない。
RelativeOrientationSensor
のサポートされるセンサーオプションは、
"frequency" および "referenceFrame" である。
7. 抽象操作
7.1. Orientation Sensor オブジェクトを構築する
- 入力
-
orientation_interface、その継承インターフェイスが
OrientationSensorを含む、インターフェイス 識別子。options、
OrientationSensorOptionsオブジェクト。 - 出力
-
OrientationSensorオブジェクト。
-
allowed を、orientation_interface により識別される インターフェイスを用いて センサーのポリシー制御機能を確認するを 呼び出した結果とする。
-
allowed が false の場合、次を実行する:
-
orientation を、orientation_interface により識別される インターフェイスの新しいインスタンスとする。
-
orientation および options を用いて センサーオブジェクトを初期化するを 呼び出す。
-
options.
referenceFrameが "screen" である場合、次を実行する: -
orientation を返す。
7.2. クォータニオンを回転行列に変換する
クォータニオンを回転行列に変換する アルゴリズムは、以下に示すように、クォータニオン [QUATCONV] から変換された 列優先順の回転行列の リスト表現を作成する:
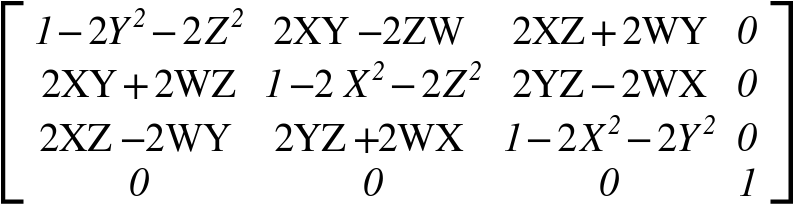
ここで:
-
W = cos(θ/2)
-
X = Vx * sin(θ/2)
-
Y = Vy * sin(θ/2)
-
Z = Vz * sin(θ/2)
-
m11 を 1 - 2 * y * y - 2 * z * z とする
-
m12 を 2 * x * y - 2 * z * w とする
-
m13 を 2 * x * z + 2 * y * w とする
-
m14 を 0 とする
-
m21 を 2 * x * y + 2 * z * w とする
-
m22 を 1 - 2 * x * x - 2 * z * z とする
-
m23 を 2 * y * z - 2 * x * w とする
-
m24 を 0 とする
-
m31 を 2 * x * z - 2 * y * w とする
-
m32 を 2 * y * z + 2 * x * w とする
-
m33 を 1 - 2 * x * x - 2 * y * y とする
-
m34 を 0 とする
-
m41 を 0 とする
-
m42 を 0 とする
-
m43 を 0 とする
-
m44 を 1 とする
-
« m11, m12, m13, m14, m21, m22, m23, m24, m31, m32, m33, m34, m41, m42, m43, m44 » を返す。
7.3. オイラー角からクォータニオンを作成する
数 alpha、数 beta、および数 gamma が与えられたとき、 オイラー角からクォータニオンを作成するには:
-
alphaInRadians を、alpha を度からラジアンに変換したものとする。
-
betaInRadians を、beta を度からラジアンに変換したものとする。
-
gammaInRadians を、gamma を度からラジアンに変換したものとする。
-
cosZ を (0.5 * alphaInRadians) の余弦とする。
-
sinZ を (0.5 * alphaInRadians) の正弦とする。
-
cosX を (0.5 * betaInRadians) の余弦とする。
-
sinX を (0.5 * betaInRadians) の正弦とする。
-
cosY を (0.5 * gammaInRadians) の余弦とする。
-
sinY を (0.5 * gammaInRadians) の正弦とする。
-
quaternionX を (sinX * cosY * cosZ - cosX * sinY * sinZ) とする。
-
quaternionY を (cosX * sinY * cosZ + sinX * cosY * sinZ) とする。
-
quaternionZ を (cosX * cosY * sinZ + sinX * sinY * cosZ) とする。
-
quaternionW を (cosX * cosY * cosZ - sinX * sinY * sinZ) とする。
-
« quaternionX, quaternionY, quaternionZ, quaternionW » を返す。
8. 自動化
この節は、Generic Sensor API § 9 Automation を、Orientation Sensor 固有の仮想センサーメタデータを提供することで拡張する。
8.1. 他の仕様への変更
この仕様は、Device Orientation and Motion § automation と次のように統合する。
-
reading の "
alpha"、 "beta"、および "gamma" キーを設定した後、 reading を返す前に、次の手順を追加する:-
reading["
quaternion"] を、 reading["alpha"]、 reading["beta"]、および reading["gamma"] を用いて オイラー角からクォータニオンを作成するを 呼び出した結果に設定する。
-
注記: この仕様は現在、 WebDriver でクォータニオンを直接指定する(そしてその結果としてクォータニオンからオイラー角を導出する) 方法を提供していない。この決定は、単純さのため、および自動化ユーザーは入力として オイラー角を扱う(または特定のクォータニオン値を選び、対応するオイラー角値を自分で提供する) 可能性がはるかに高いという前提のもとで行われた。クォータニオン値を直接提供できることに 関心を持つ、異なるユースケースのユーザーからのフィードバックは、この仕様の課題トラッカーを通じて歓迎される。
8.2. Absolute Orientation Sensor の自動化
absolute-orientation 仮想センサー型と、 型ごとの仮想センサーメタデータ マップ内の 対応するエントリーは、Device Orientation and Motion § automation で定義される。
8.3. Relative Orientation Sensor の自動化
relative-orientation 仮想センサー型と、 型ごとの仮想センサーメタデータ マップ内の 対応するエントリーは、Device Orientation and Motion § automation で定義される。
9. 謝辞
Generic Sensor API への取り組みについて Tobie Langel に感謝する。